
· @cyclical_obsessive
32 followers · 199 posts · Server fosstodon.org
· @cyclical_obsessive
31 followers · 152 posts · Server fosstodon.orgHaving a #robot in your home can be humorous when the robot decides to talk unexpectedly.
Out of the blue my #GoPiGo3 robot Carl announced “??? STOP”.
Out of curiosity I reviewed his speech.log to find that he had blurted out “Executing STOP”. Then I reviewed his voice.log and found he thought he heard “I don’t list you stop”.
I was to blame for my ADHD robot’s outburst. I forgot to tell him “Hey Carl, Go To Sleep!” and he would have responded “Going to sleep; Listening only for ‘WAKEUP’”.
· @cyclical_obsessive
31 followers · 147 posts · Server fosstodon.org@pythonhub This is so cool, thanks!
I put it on my Pi4 2GB Ubuntu 22.04 Jammy #GoPiGo3 #robot and tried -
Input: “I love my robot, but my robot thinks"
Output: "I’m a robot. I’m not. I’m not a robot. I’m not a robot”
It used 1.4GB of virtual memory, 800MB of physical memory, all four cores at 100% for about 24 seconds.
· @cyclical_obsessive
28 followers · 105 posts · Server fosstodon.orgI'm in a robot funk.
I want my robot to be "aware", "interactive", "self-contained", "always on", "learning", no subscriptions, programmable, (but not requiring me to program every capability), and I want a community of smart people with the same robot, that I can learn from.
I thought TurtleBot4 would fit the bill, but it had too many "issues", so went back.
I just watched Amazon's Astro Unboxing. Cool bot, but also not for me.
· @cyclical_obsessive
28 followers · 105 posts · Server fosstodon.org
Loving #ROS2 #Humble on my #GoPiGo3 #RaspberryPi4 #robot
3 hours 47 minutes "life" with on-board #slam_toolbox synchronous #mapping running, and a little driving around the room:
#ros2 #humble #GoPiGo3 #raspberrypi4 #robot #slam_toolbox #mapping
· @cyclical_obsessive
28 followers · 105 posts · Server fosstodon.org@orionrobots more detail please. When my #ROS2 #GoPiGo3 #robot wanders the house, only the kitchen forms a good map. When I built a quick (and too flexible) playground, the #maps looked amazing. Can’t decide how much reality I want to deal with while learning.
· @cyclical_obsessive
28 followers · 105 posts · Server fosstodon.orgMy #GoPiGo3 #Robot Carl Learning To Listen With #speechrecognition
https://player.vimeo.com/video/502786912
#GoPiGo3 #robot #speechrecognition #ros2 #run
· @cyclical_obsessive
28 followers · 105 posts · Server fosstodon.org
Nick, I'm a robot hobbyist trying to enable inexpensive #ROS2 (Robot Operating System) education using the #RaspberryPi based #GoPiGo3 #robot
I am looking for folks to test my latest "ROS2/#Ubuntu 22 Server for GoPiGO3 Robots" image is you perhaps know any owners of this fun robot.
#ros2 #raspberrypi #GoPiGo3 #robot
· @cyclical_obsessive
28 followers · 105 posts · Server fosstodon.org
· @cyclical_obsessive
28 followers · 105 posts · Server fosstodon.org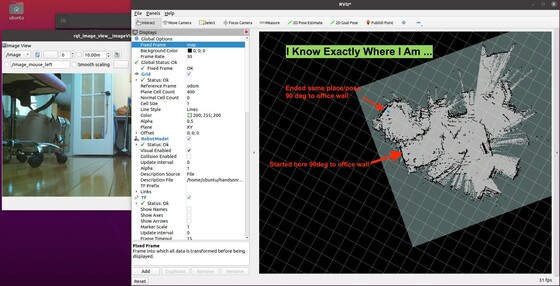
Surely I am crazy to think anyone will ever use my Free Open Source Software "Headless Install #ROS2 Humble on #Ubuntu 22.04 Jammy Server for #GoPiGo3 Robots"
but version 4 uSDcard image is now available for #RaspberryPi 3B, 3B+, and #Pi4B. (Including work around solution for PiCamera image publishing to /Image topic)
https://github.com/slowrunner/ROS2-GoPiGo3#headless-setup-for-a-ros2-gopigo3-robot
#ros2 #ubuntu #GoPiGo3 #raspberrypi #Pi4B
· @cyclical_obsessive
28 followers · 105 posts · Server fosstodon.org
Sometimes, when I get thinking this “ROSification” of my #RaspberryPi #ROS2 #GoPiGo3 robot is just too hard, I start dreaming of belonging to “Team Turtlebot” and wonder what that would cost me.
I put together this comparison:
· @cyclical_obsessive
28 followers · 105 posts · Server fosstodon.orgWishing for a new #ROS on #GoPiGo3 #robot person to appear on https://forum.dexterindustries.com
(A #RaspberryPi4 2GB and US$129 gives a great #ROS2 robot to start learning on.)
#ros #GoPiGo3 #robot #raspberrypi4 #ros2
· @cyclical_obsessive
28 followers · 105 posts · Server fosstodon.org@brianb
Here is my #RaspberryPi #GoPiGo3 robot's crontab -e:
```
@reboot sleep 10 && /home/pi/Carl/nohup_loglife.sh
@reboot sleep 75 && /home/pi/Carl/nohup_juicer.sh
@reboot sleep 100 && /home/pi/Carl/nohup_wheellog.sh
@reboot sleep 120 && /home/pi/Carl/nohup_voicecmdr.sh
@reboot sleep 180 && /home/pi/Carl/nohup_healthCheck.sh
```
and this is one of the files it starts:
https://github.com/slowrunner/Carl/blob/master/nohup_voicecmdr.sh
**I think the key takeaway is to use full paths everywhere.**
· @cyclical_obsessive
28 followers · 105 posts · Server fosstodon.org
On a "can't believe it" success high!
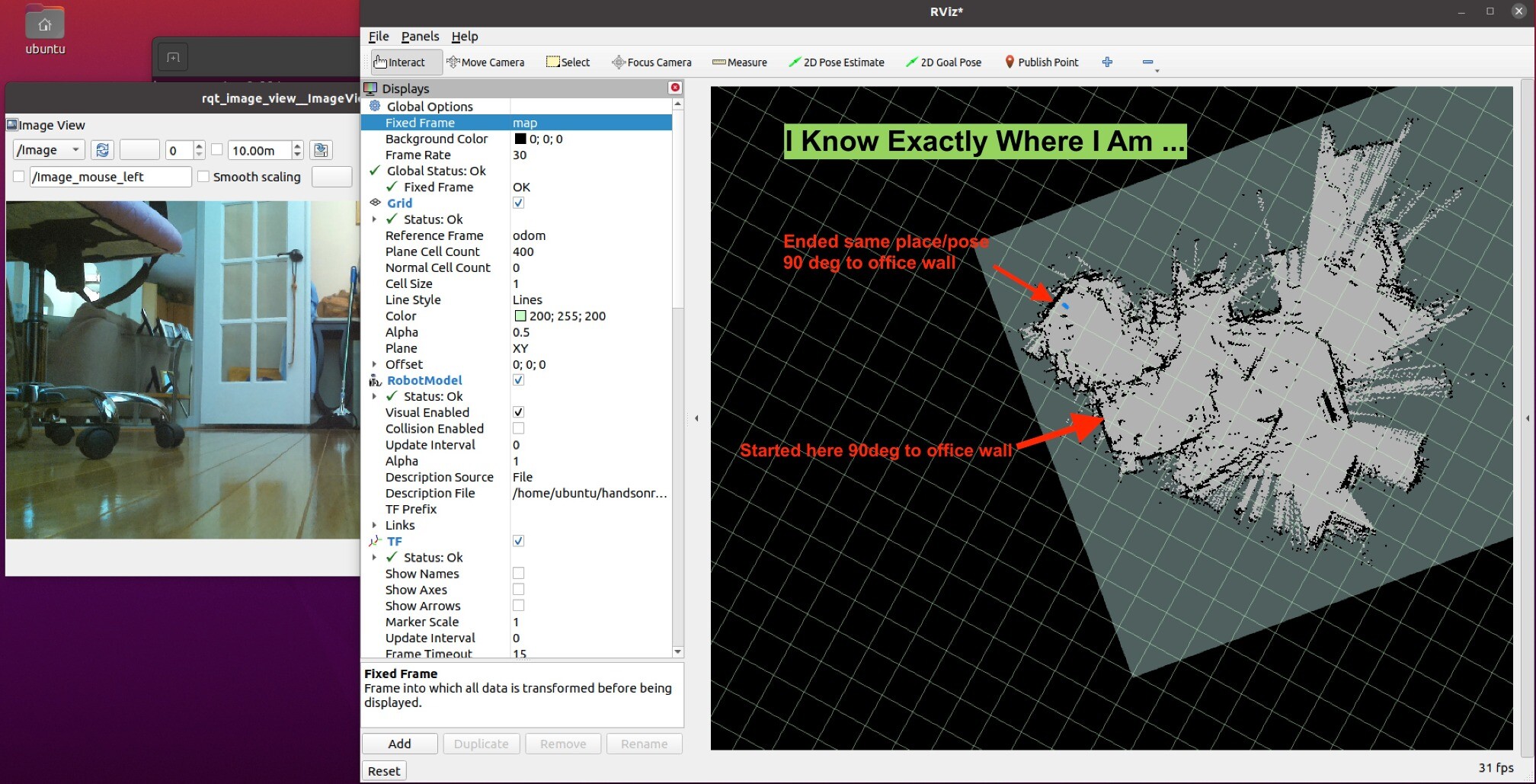
I couldn't get #ROS2 v4l2 camera node (#Ubuntu 22.04 Server on #RaspberryPi) to pass video, but did manage to build libcamera/libcamera-apps and and a node that passes 10 frames a minute.
I can visually see "what the robot is seeing" to compare with the current rviz2 map topic.
My #GoPiGo3 mounted RPi4 is running 30-40% cpu load, using 700MB memory, keeping a cool 55degC. Everything on the RPi except the visualization apps - rviz2 and rqt-image-viewer.
#ros2 #ubuntu #raspberrypi #GoPiGo3

CleoQc 🇨🇦🌈:python:🕰🧶 · @Cleoqc
390 followers · 708 posts · Server fosstodon.org
· @cyclical_obsessive
28 followers · 105 posts · Server fosstodon.org
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Success - #ROS2 #HumbleHawksbill over #Ubuntu 22.04 Server #JammyJellyfish on my #GoPiGo3 #robot
Software:
https://github.com/slowrunner/ROS2-GoPiGo3
Hardware:
https://gopigo.io/gopigo-core/
#ros2 #HumbleHawksbill #ubuntu #JammyJellyfish #GoPiGo3 #robot
· @cyclical_obsessive
28 followers · 105 posts · Server fosstodon.org"What's on your mind?"
#ROS2 and the exciting #turlebot4 user manual at https://turtlebot.github.io/turtlebot4-user-manual/
#PiMoroni HeatSink Case for #RaspberryPi4 lacking M2.5 HAT threads
So that I can finally mount a Pi4 on my #GoPiGo3 and use the full processing power
for #OpenCV #houghlines to implement #linefollowing and #obstacledetection with #linecrossing method
#ros2 #turlebot4 #pimoroni #raspberrypi4 #GoPiGo3 #opencv #houghlines #linefollowing #obstacledetection #linecrossing #humanity #inhumane