
· @cyclical_obsessive
28 followers · 105 posts · Server fosstodon.orgFirst test of my new #ROS2 #Galactic #TurtleBot4lite power system.
This was the first discharge-to -20%-recharge-cycle in "as delivered" config.
Summary:
- max operating time, (to <20% charge), off the dock is about 1.75 hours
(No motion, just pubs Create3 topics, LiDAR scan, Oak-D-Lite color image, stereo 3D cloud, Localization and Mapper)
Recharge: ~2 hours
Battery "full": percentage = 1.0
If stays on dock after full:
- bot drains ~9 min to 95%,
- then recharges ~11 min to 100%
#ros2 #galactic #TurtleBot4lite
· @cyclical_obsessive
28 followers · 105 posts · Server fosstodon.org
Choosing a name for my new #TurtleBot4lite
Trying out:
WaLI - Wall follower Looking for Intelligence
Wouldn't you think they would include a TurtleBot4 logo sticker (or two)?
Yo #ClearPathRobotics Its #ROS2 and a #TurtleBot4 - It needs a logo on it.
#TurtleBot4lite #clearpathrobotics #ros2 #turtlebot4
· @cyclical_obsessive
28 followers · 105 posts · Server fosstodon.orgAm I the only person that did not know SSIDs are case sensitive?
Had one chance to setup my new #Turtlebot4lite Raspberry Pi4's WiFi without using wired Ethernet, and I blew it.
Luckily, had a laptop I could setup with a static IP, and luckily the drawer with the RPi4 can be opened enough to plug in an Ethernet cable.
Step 1: Connect TB4lite RPi4 to 5GHz WiFi done.
Now to Connect the TB4lite's Create3 base to my 2.4GHz WiFi.
· @cyclical_obsessive
28 followers · 105 posts · Server fosstodon.org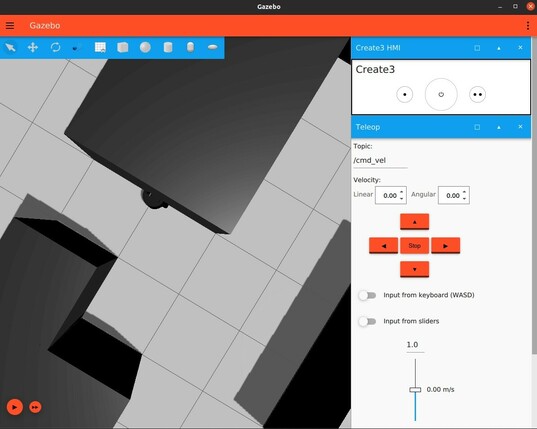
>"What's on your mind?"
My #TurtleBot4lite arrives today! I participated in the #iRobot #Create3 beta (via #simulation,
they didn't gift me with hardware), so I am familiar with the #robot's lower level #topics, #services, and #actions.
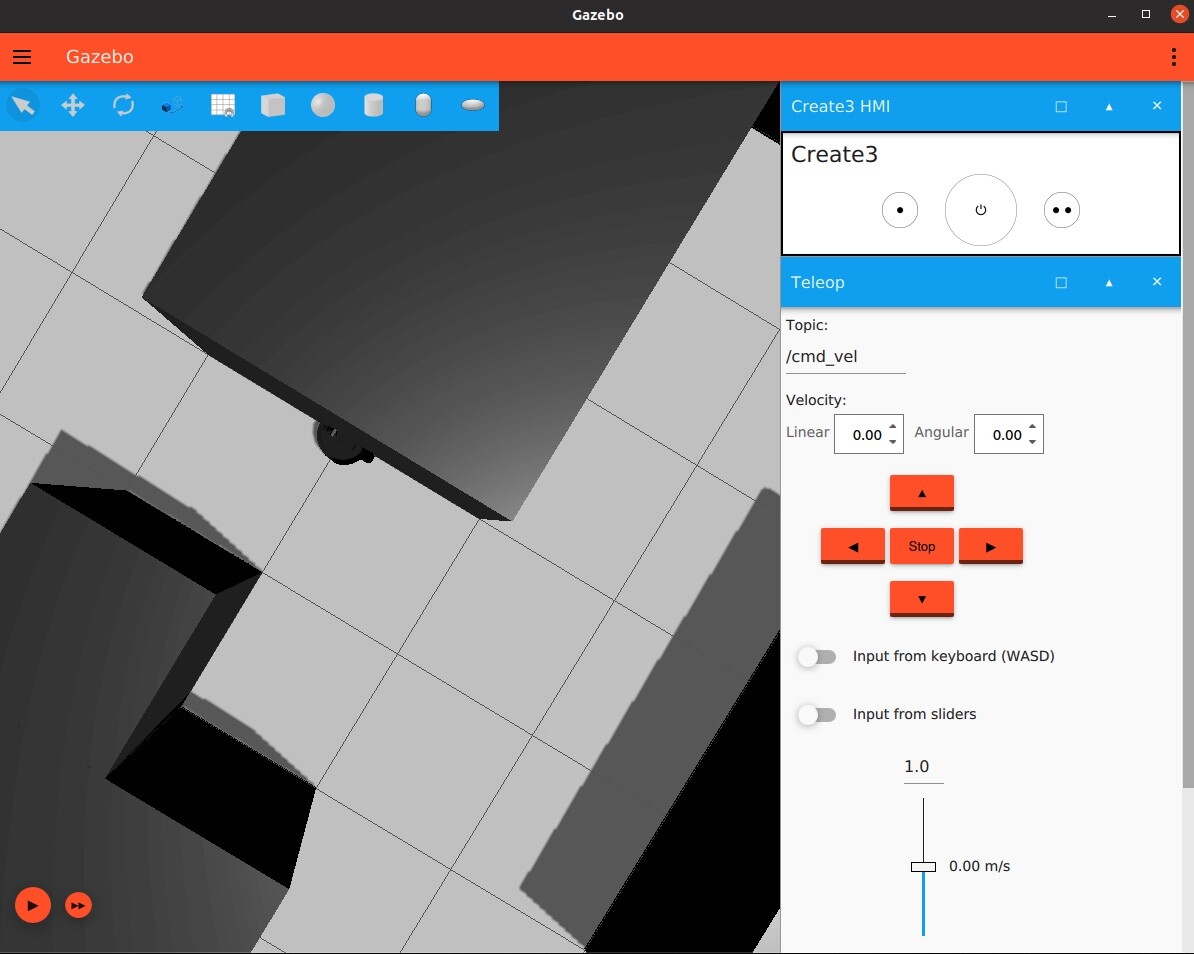
My #ROS2 #Galactic #Ignition #Gazebo crashes loading the default #TB4 world.
And TB4 comes up half embedded in an obstacle in the maze world, but managed #dock, #undock, #wallfollow and to drive the TB4lite around with a #teleop_twist_keyboard node.
#TurtleBot4lite #irobot #create3 #simulation #robot #topics #services #actions #ros2 #galactic #ignition #gazebo #TB4 #dock #undock #wallfollow #teleop_twist_keyboard

{kind=link}
{kind=link}
{kind=link}