
Tom Williams · @williamstome
195 followers · 114 posts · Server hci.socialAhh!!! Thrilled for MIRRORLab students Terran Mott, Rafael Sousa Silva, Alexa Bejarano, Mark Higger, and Ruchen (Puck) Wen for winning the #ICRA2023 Roboethics competition!!!
WeeklyRobotics · @weeklyrobotics
40 followers · 27 posts · Server fosstodon.orgThis week in Weekly Robotics ICRA 2023 special: Boston Dynamics AI Institute, O3DE simulation with ROS 2, robotic avatars at the exhibition floor, and more!
#robotics #conference #icra2023

Ricard Marxer · @ricardmp
132 followers · 28 posts · Server sigmoid.social
Clémentin Boittiaux presenting the Homography-Based Loss at #ICRA2023 !! 👏👏

Gary Hall · @garyhall
137 followers · 181 posts · Server hcommons.socialHad a great time at the ICRA Robots and Automation conference in London this week!
Thanks to everyone who very kindly hosted me. Highlights included Jasia Reichardt's keynote 'In Praise of Strangeness': https://www.icra2023.org/plenary-keynote-sessions
And the performance by the legend that is Stelarc: https://www.icra2023.org/art-robotics-stelarc
#icra2023 #stelarc #robot #automation #london

Helen Czerski · @helenczerski
5491 followers · 364 posts · Server fediscience.org
I'm hosting sessions at ICRA 2023 today (the International Conference on Robotics and Automation, a huge global robotics conference), and this morning I sat on stage next to Hiroshi Ishiguru as his “copy of himself” - the robot Geminoid (here: https://www.youtube.com/watch?app=desktop&v=AwMfNq1x_kQ 1:30min in) GAVE A TALK, with incredibly realistic facial expressions and hand gestures. My mind is still reeling. Not sure what we’d do with such things, but it’s incredibly impressive. #ICRA2023

· @bcnm
11 followers · 159 posts · Server techhub.socialCheck it out! @Ken_Goldberg at #ICRA2023 - and a finalist for the Outstanding Automation Paper award!
https://bcnm.berkeley.edu/news-research/5602/ken-goldberg-at-icra-2023

Stéphane Caron · @locoscaron
29 followers · 36 posts · Server fosstodon.orgI will be in London next week for #ICRA2023. Shoot me a DM if you'd like to meet up 😀

Markus Wulfmeier · @mwulfmeier
395 followers · 73 posts · Server sigmoid.socialWant to visit us during #ICRA2023 and learn more about what we do @Google @DeepMind in #Robotics?
Want to learn more about #MuJoCo?
Now is your chance https://rsvp.withgoogle.com/events/mujoco-icra-2023
Prof Hugo Spiers · @hugospiers
825 followers · 468 posts · Server mastodon.sdf.orgRT @AirLabCMU
How can robots navigate complex, unstructured off-road terrains without expensive, hand-engineered semantic labels?
Our accepted #ICRA2023 paper investigates how to learn continuous, fine-grained traversability costmaps using self-supervision! https://mateoguaman.github.io/hdif

Heiko Hamann · @SwarmDynamics
64 followers · 70 posts · Server mastodon.world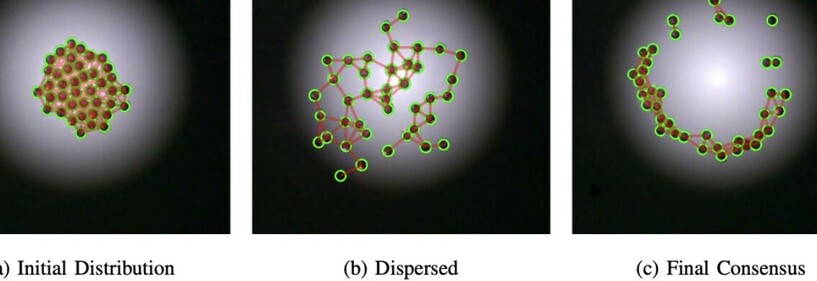
We have put a preprint online now:
https://arxiv.org/pdf/2302.13629.pdf
Estimation of Continuous Environments by Robot Swarms: Correlated Networks and Decision-making
with @mohsen_raoufi and @PRomanczuk
have fun!
#swarm #robotics
---
RT @SwarmDynamics
Our #ICRA2023 paper got accepted!
Estimation of Continuous Environments by Robot Swarms: Correlated Networks and Decision-making
with @mohsen_raoufi @PRomanczuk
It has quite some…
https://twitter.com/SwarmDynamics/status/1615438945910677527
Heiko Hamann · @SwarmDynamics
64 followers · 70 posts · Server mastodon.world
RT @ieee_ras_icra
Nearly 60 workshops and tutorials to choose from at #ICRA2023! Many have their own calls for contributions - don't miss the deadlines! https://www.icra2023.org/programme/workshops-tutorials

Giovanni Beltrame · @beltrame
166 followers · 221 posts · Server fediscience.org
Dmytro Mishkin 🇺🇦 · @ducha_aiki
914 followers · 301 posts · Server sigmoid.social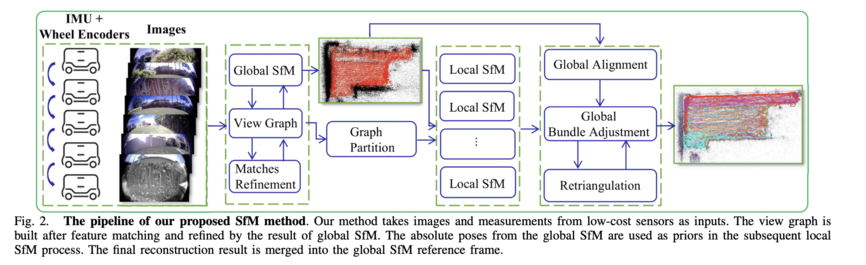
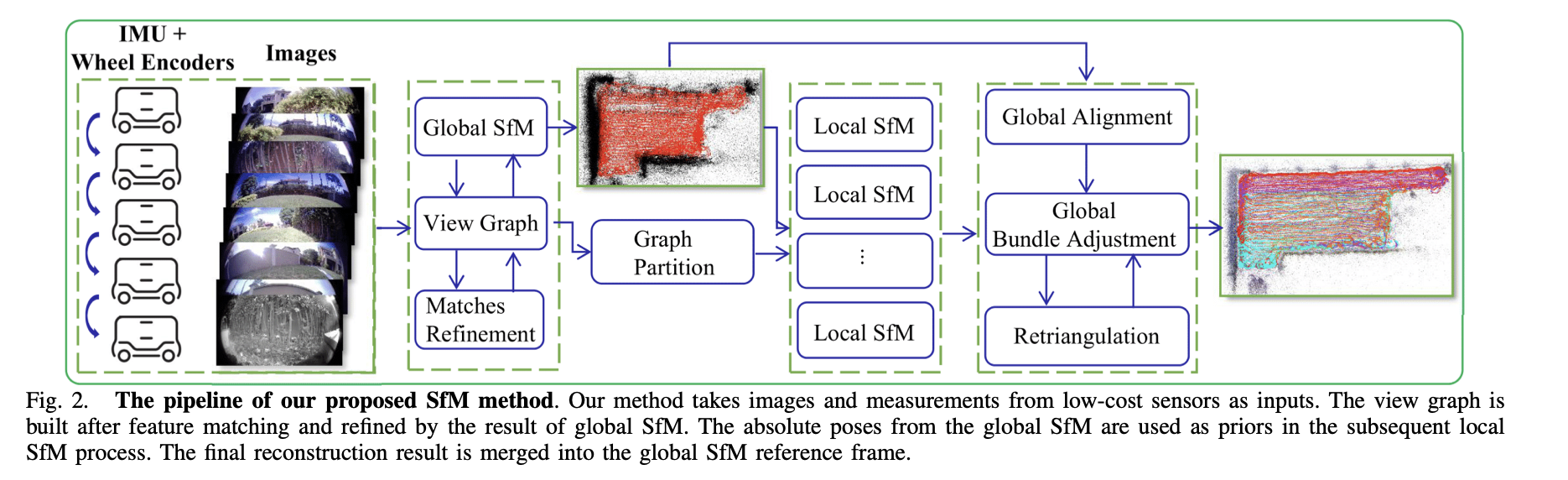
AdaSfM: From Coarse Global to Fine Incremental Adaptive Structure from Motion
Yu Chen, Zihao Yu, Shu Song, Tianning Yu, Jianming Li, Gim Hee Lee
tl;dr: split view-graph into smaller with IMU sensors,use incremental SfM locally, global globally
#icra2023 #computervision #deeplearning #dmytrotweetsaboutdl
Prof Hugo Spiers · @hugospiers
739 followers · 243 posts · Server mastodon.sdf.orgGreat to hear your coming to #ICRA2023 @maththrills
I'm due to give a talk in the workshop on
Unconventional spatial representations: Opportunities for robotics
Monday 29th May
Perhaps we can catch up whilst watching the Autonomous Drone Racing Competition:
---
RT @davsca1
Exciting news! The #ICRA2023 Autonomous Drone Racing Competition is launching! Showcase your skills and developments in autonomous drone navigation. Register your tea…
https://twitter.com/davsca1/status/1618675130217140224
Giovanni Beltrame · @beltrame
164 followers · 215 posts · Server fediscience.org
RT @jonaskuResearch
Our paper got accepted at #ICRA2023 🥳
Together with @ilgha3, @dgarzonramos and @mbirattari, we designed a #robot #swarm only from demonstrations of the collective behavior.
Video preview of our work: http://youtu.be/QfzuAdS34J0 https://twitter.com/Demiurge_ULB/status/1615750566465896457
Heiko Hamann · @SwarmDynamics
64 followers · 70 posts · Server mastodon.world
RT @Demiurge_ULB
A paper from the ERC project #DEMIURGE in @ieee_ras_icra (#ICRA2023).
"Show me what you want: Inverse reinforcement learning to automatically design robot swarms by demonstration".
📽️: https://youtu.be/QfzuAdS34J0
📄: https://doi.org/10.48550/arXiv.2301.06864
@ULBRecherche, @frsFNRS, @ERC_Research.
Giovanni Beltrame · @beltrame
164 followers · 212 posts · Server fediscience.orgExcellent work by @SwarmSoma and Koresh!
---
RT @SwarmSoma
I am excited to announce our paper
"A Complete Set of Connectivity-aware Local Topology Manipulation Operations for Robot Swarms" got accepted at #ICRA2023.
with @jumpjoe78, @lorenzo_s83, Koresh Khateri, Mahdi Pourgholi and Mohsen Montazeri
Paper: https://arxiv.org/abs/2210.00037
https://twitter.com/SwarmSoma/status/1615461366499889155
Heiko Hamann · @SwarmDynamics
64 followers · 70 posts · Server mastodon.world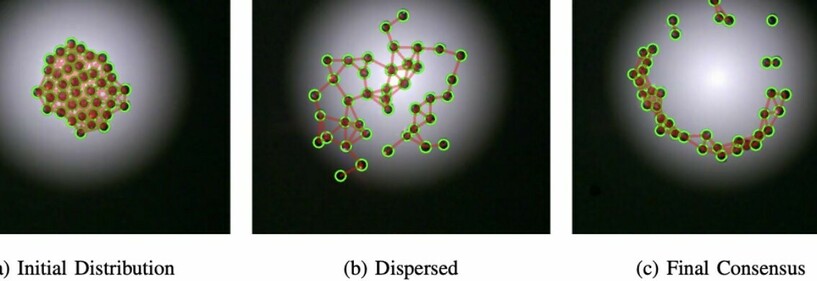
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
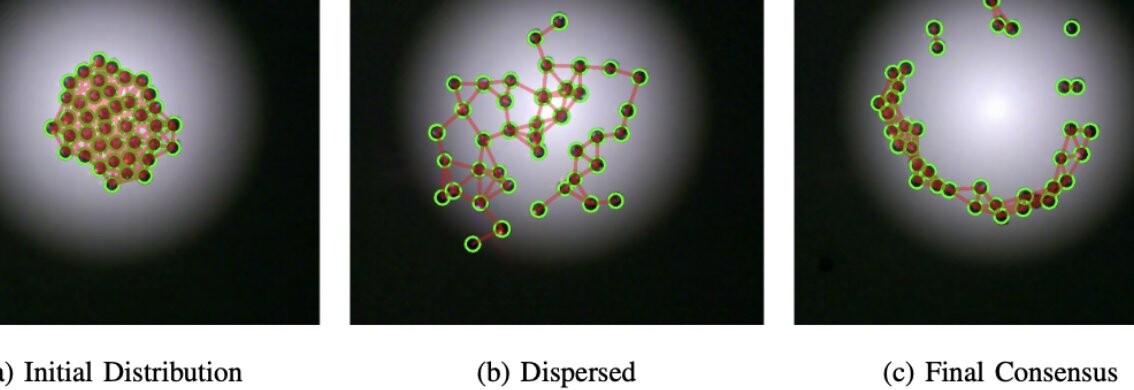
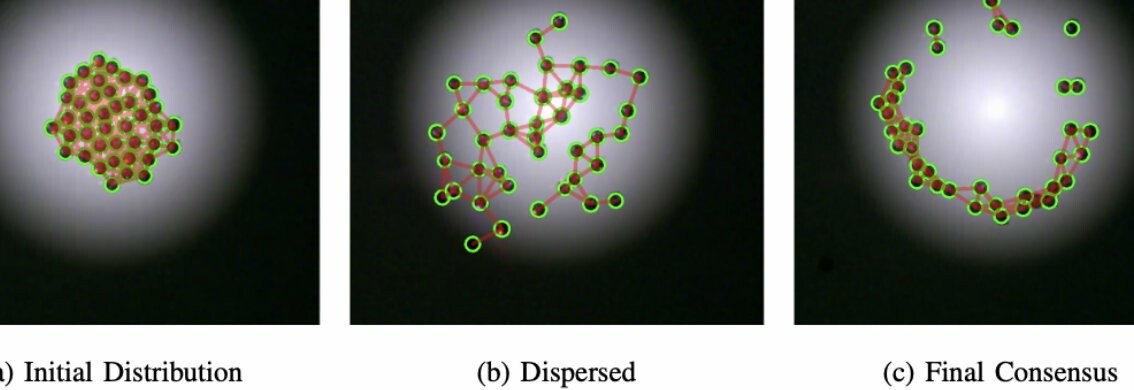
Our #ICRA2023 paper got accepted!
Estimation of Continuous Environments by Robot Swarms: Correlated Networks and Decision-making
with @mohsen_raoufi @PRomanczuk
It has quite some intense #Kilobot action & they form contour lines as consensus.
#icra2023 #kilobot #swarm #robotics

Francisco Martín Rico · @fmrico
59 followers · 15 posts · Server mastodon.socialOur paper has been accepted at #ICRA2023 🥳🍾
London, here we go!! @jm__guerrero
#AlbertoGarcia @FranciscoLera @vmatellan
@IntellRobotLabs
@RoboticaUnileon @URJCcientifica
Paper: https://arxiv.org/abs/2209.07586
Code (#ROS2/#Nav2): https://github.com/fmrico/mh_amcl
Video: https://youtu.be/LnmQ11Ew01g
#icra2023 #albertogarcia #ros2