
TheSilentHolographer · @TheSilentHolographer
2 followers · 63 posts · Server techhub.socialOf the space I've managed to get working so far, the parts I like least of #ros2 and #microros arise from a convention of skipping the minimal project template (a "hello world") in favor of encouraging starting from one of several demos, checked out from git, as a functional template.

· @cyclical_obsessive
32 followers · 199 posts · Server fosstodon.org
TheSilentHolographer · @TheSilentHolographer
2 followers · 53 posts · Server techhub.socialI'm not sold on the ease of use of the package management in #ros2 compared to apt, pip, nuget, psgallery, and friends

David Lu!! · @dlu
46 followers · 46 posts · Server fosstodon.orgNew Paper Alert:
"From the desks of #ROS maintainers: A survey of modern & capable mobile robotics algorithms in #ROS2"
https://doi.org/10.1016/j.robot.2023.104493
David Lu!! · @dlu
41 followers · 36 posts · Server fosstodon.orgNew ROS 2 Package: 𝚌𝚕𝚊𝚜𝚜𝚒𝚌_𝚋𝚊𝚐𝚜
https://discourse.ros.org/t/classic-bags-ros-2-bags-with-ros-1-interface/31637
#ROS2 #ROS__2 #ROS
David Lu!! · @dlu
41 followers · 33 posts · Server fosstodon.orgMy basic response to the Intrinsic Product Keynote:
https://mcelroymerch.com/products/cure-alls-cure-nothing-shirt

Qiita - 人気の記事 · @qiita
2 followers · 154 posts · Server rss-mstdn.studiofreesia.comubuntu22.04、ROS2 Humble環境でRealSenseを使用する手順
https://qiita.com/porizou1/items/9d44053dbce648f1470d?utm_campaign=popular_items&utm_medium=feed&utm_source=popular_items
#RealSense #ROS2 #Ubuntu22_04

laelu · @laelu
4 followers · 50 posts · Server qubit-social.xyz

HistoriCode97 · @historicode97
7 followers · 9 posts · Server fosstodon.org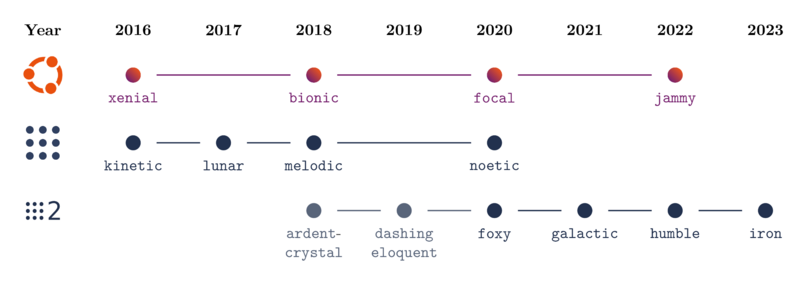
esoriano · @esoriano
127 followers · 295 posts · Server social.linux.pizzaWe are building RIPS, a Robotic Intrusion Prevention System (IPS) for #ros2 systems. So far, so good! We have a working demo of the core (the rules compiler and engine), the ros2 monitor, and a terminal based dashboard.
David Lu!! · @dlu
40 followers · 30 posts · Server fosstodon.org"There are only two hard problems in computer science: cache invalidation, naming things and off by one errors."
Here's a (partial?) list of unforced naming crusades undertaken by the keepers of ROS:
* It's not OSRF anymore, it's Open Robotics.
* It's not Gazebo, it's Ignition.
* Ha, it's not Ignition, just kidding.
* It's ROS 2, not ROS2.

The Linux Foundation · @linuxfoundation
24 followers · 14 posts · Server social.lfx.dev
O3DE has become a rising star in the world of #robotic #simulations. Robotec has joined as a new member, contributing new #ROS2 and #Lidar gems, and Adam Dabrowski shares how #O3DE is developing the next generation of robots.
Learn more: https://hubs.la/Q01GMvWQ0
@o3dengine
#robotic #simulations #ros2 #lidar #o3de

Rosmo · @rosmo
94 followers · 306 posts · Server mas.to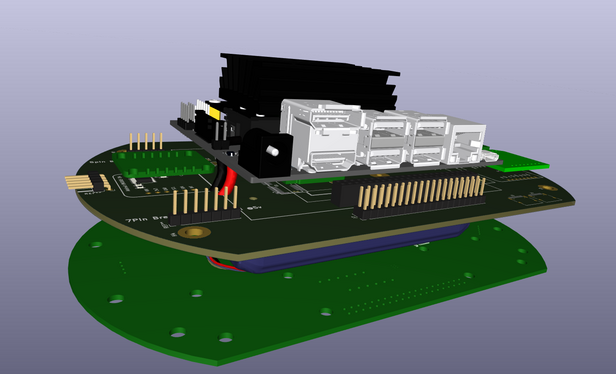
Hardware development is continuing on #rosmorobot. Starting working on the software side: https://github.com/rosmo-robot/smartcar_shield/issues it's a volunteer #OpenHardware project to develop a capable small robot car. #Arduino #ROS2 #Python
#Python #ros2 #arduino #openhardware #rosmorobot
David Lu!! · @dlu
39 followers · 27 posts · Server fosstodon.org
David Lu!! · @dlu
37 followers · 20 posts · Server fosstodon.orgAre you trying to translate your #ROS1 launch files to #ROS2 launch files?
Check out "ROSetta Launch," a collection of side-by-side ROS 1 and ROS 2 launch files.
https://discourse.ros.org/t/rosetta-launch-everything-i-know-about-ros-1-and-ros-2-launch-files/29648
#ROS

Giovanni Beltrame · @beltrame
166 followers · 217 posts · Server fediscience.orgGreat work by @PYLajoie! I believe this release sets a benchmark for performance and usability in #robotics. Open source, paper on arXiv, works on #ROS2. Work done @polymtl @OpenRoboticsOrg
---
RT @PYLajoie
Check out our new Swarm-SLAM: Sparse Decentralized Collaborative Simultaneous Localization and Mapping Framework for Multi-Robot Systems!
Paper: https://arxiv.org/abs/2301.06230
Code: https://github.com/MISTLab/Swarm-SLAM
https://twitter.com/PYLajoie/status/1620778238435024897

Davó · @DSinapellido
72 followers · 392 posts · Server mastodon.cloud
Rosmo · @rosmo
92 followers · 281 posts · Server mas.to
RT @EProsima@twitter.com
🤖 Create #ESP32 #Maqueen Battle Bots with #microROS!
Run micro-ROS in an ESP32 Turtlebot and #ROS2 on a host computer using Dockers.
👏 Kudos to John Gentilin for creating this project and making it #opensource!
Check this project's GitHub repo at: https://buff.ly/3HsPlKi
#opensource #ros2 #microROS #maqueen #esp32
Rosmo · @rosmo
92 followers · 281 posts · Server mas.to
RT @kamathsblog@twitter.com
Update: the PS4 controller for #ROS2 Humble is ready!
The author reviewed, fixed and merged it at lightning fast speed, I wish this also happened for my PRs at work 😅
https://github.com/naoki-mizuno/ds4_driver https://twitter.com/kamathsblog/status/1619048648310165504
🐦🔗: https://twitter.com/kamathsblog/status/1619258499078451200

Aditya Kamath · @kamath
35 followers · 28 posts · Server hachyderm.io
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Looking for someone with Docker experience to review this ROS driver for a PS4 controller. https://github.com/adityakamath/ds4_driver_ros/tree/humble-devel
I had to split up message generation from the driver nodes to support ROS 2 Humble, not sure if the Docker scripts still work...
#ps4 #robotics #ros #ros2 #docker